![]() Medieninformation Nr. 131 vom 20. Juni 2005 - Bearbeiter/-in: pp
Medieninformation Nr. 131 vom 20. Juni 2005 - Bearbeiter/-in: pp
|
|
[TU Berlin] [Pressestelle] [Medieninformationen] [<<] [>>]
Ingenieure der TU Berlin entwickeln neue Konzepte für die Medizintechnik
 Christian Fleischer demonstriert den Bein-Orthesen-Roboter beim Treppen steigen Foto: TU Pressestelle Download |
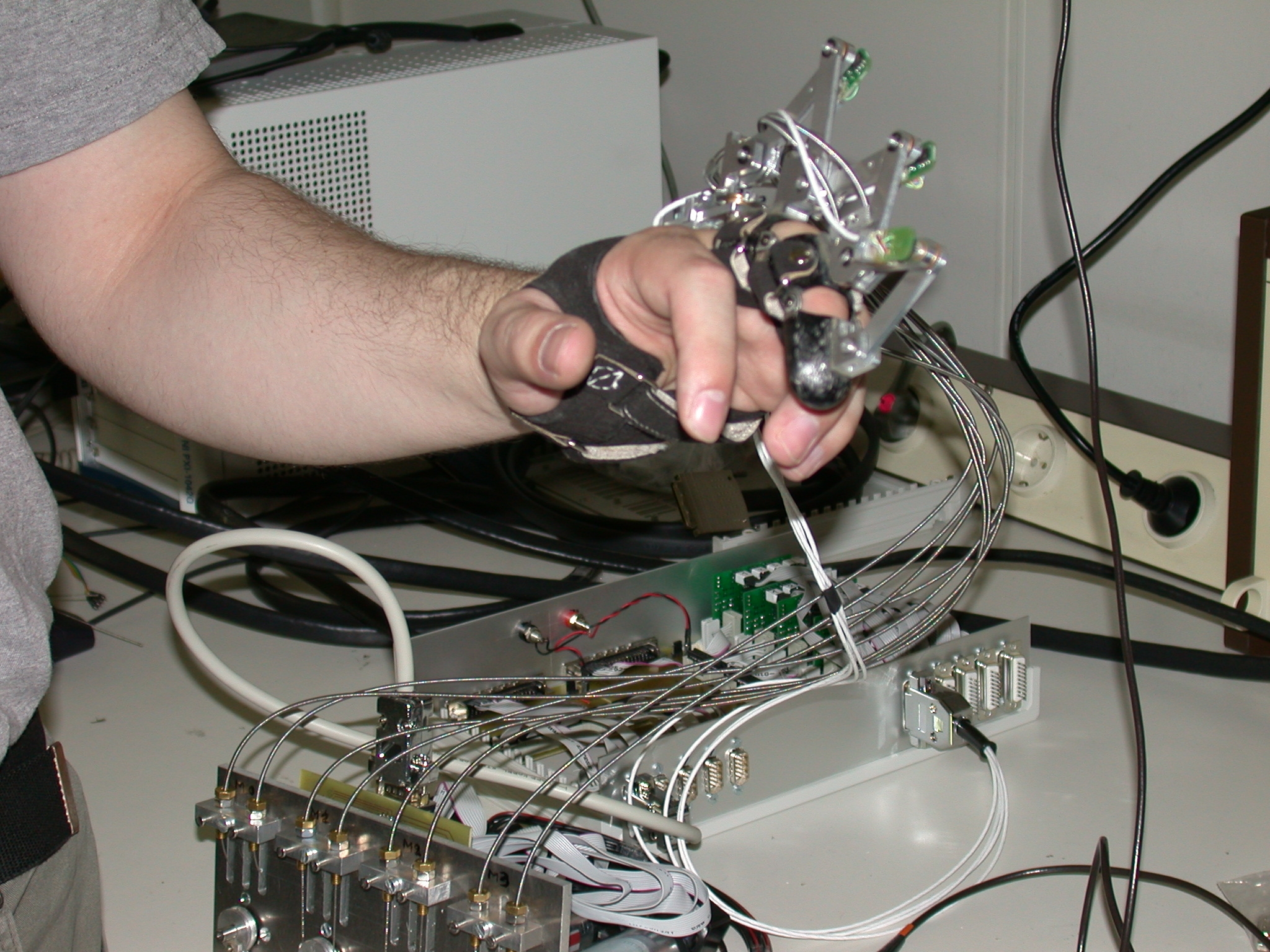
 Das Finger-ExoSkelett soll helfen, steife Finger wieder zu bewegen Foto: TU Pressestelle Download |
Wenn die Hand verletzt ist, Arme und Beine unbeweglich sind, zum Beispiel in Folge von Schlaganfällen, wirft das für Patient und Arzt viele Probleme auf. Auch die wirtschaftlichen Konsequenzen sind nicht unerheblich. Doch es sind nicht nur Gesundheits- und Medizinforscher, die sich dieses Problems annehmen. An der TU Berlin entwickeln Ingenieure der Technischen Informatik unter Leitung von Prof. Dr. Günter Hommel die "intelligente" Orthese: Einen so genannten ExoSkelett-Roboter, der den Körper von außen stützt, ihn zu Bewegungen animiert und diese sogar für ihn und mit ihm ausführt. Das Besondere: Das ExoSkelett kann voraussehen, welche Bewegung der Bewegungsunfähige machen möchte und diese dann mit dessen Körperteil ausführen.
Die Rehabilitation dauert meist lange, die Therapie ist teuer und hängt überdies oft von der Motivation der Patienten ab, kontinuierlich und auch ohne Therapeuten Bewegungsübungen auszuführen. Patienten, die Arme oder Beine gar nicht selbst bewegen können, sind ohnehin auf die ständige Gegenwart des Therapeuten oder Trainers angewiesen.
"Der Roboter ist eine so genannte Orthese, denn sie ersetzt kein Körperteil, sondern unterstützt ein vorhandenes", erklärt Christian Fleischer. Seit eineinhalb Jahren entwickelt der Ingenieur aus dem Institut für Technische Informatik und Mikroelektronik der TU Berlin seinen Bein-Orthesen-Roboter. Er wird dabei unterstützt von einem Medizintechnik-Hersteller, der sehr an seiner Forschung interessiert ist. "Mit Sensoren können wir noch vorhandene Muskelspannungen wahrnehmen, auf ein Menschenmodell im Computer übertragen, der dann die gewünschte Bewegung zum Beispiel Beugung oder Streckung der Oberschenkelmuskeln auf die Mechanik und Motoren des ExoSkeletts zurück überträgt und die gewünschte Bewegung ausführt." Ein solches Modell kann für die Therapie sehr Kosten sparend sein. Der Patient kann es auch allein zu Hause handhaben. Zudem können viele Patienten gleichzeitig betreut werden.
Christian Fleischers Kollege Andreas Wege hat ein ExoSkelett für die Hand entwickelt und zwar für alle Finger einzeln. "Neu an unserem ExoSkelett ist vor allem, dass alle vier Freiheits-grade der Bewegung in den Fingergelenken ausgeführt werden können." Weges Modell arbeitet ebenfalls mit Motoren und Bowdenzügen. Für den Arzt ist wichtig, dass die gewünschte Bewegung des Fingers im Computer eingegeben werden kann, anschließend führt das als Handschuh getragene ExoSkelett die Bewegung mit der kranken Hand aus. Das Projekt wird durch die Deutsche Forschungsgemeinschaft gefördert und wurde jüngst um zwei Jahre verlängert.
Christian Fleischer und Andreas Wege sind keine Mediziner, sondern Technische
Informatiker. Das notwendige Fachwissen holen sie sich im Austausch mit ihren
Kooperationspartnern, die dicht an der Praxis arbeiten. Andreas Wege kooperiert mit dem Universitätsklinikum Ulm. Dort holt er sich die Informationen, die er braucht quasi direkt vom Krankenbett ab.
{kind=link}
{kind=link}