TU intern - Juni 2000 - Forschung
Begegnung zweier Welten der RobotikTU-Informatiker entwickelten Roboter-Installation für die Ausstellung "7 Hügel"
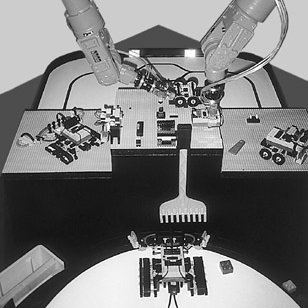
Im Rahmen der Ausstellung "7 Hügel - Bilder und Zeichen des 21. Jahrhunderts" im Berliner Martin-Gropius-Bau plante die Berliner Festspiele GmbH eine Roboterinstallation, ein Projekt, mit dem Prof. Günter Hommel vom Institut für Technische Informatik der TU Berlin beauftragt wurde. Die ursprüngliche Idee: Zwei Industrieroboter der Firma Kuka sollten in einem Raubtierkäfig tanzen. Doch schon bald wurde nach anderen Aufgaben gesucht. Eine ironische Präsentation - so ließe sich charakterisieren, was die TU-Informatiker nun im Themenbereich "Kern" der "7 Hügel"-Ausstellung im Martin-Gropius-Bau vorstellen. Zwei Industrieroboter spielen mit den seit einiger Zeit auf dem Markt befindlichen Spielzeugrobotern von Lego - Begegnung zweier Welten der Robotik. Auf der einen Seite stehen die seit drei Jahrzehnten etablierten Industrieroboter mit ihrer großen Kraft und Präzision: Selbst die Kleinsten der aktuellen Baureihe können 6 kg mit atemberaubender Geschwindigkeit bewegen und Positionen mit einer Genauigkeit von 0,1 mm wiederholt anfahren. Demgegenüber sind die Lego-Roboter, wie alle Plastik-Spielzeuge, eher ungenau, nicht sehr stabil und mit ausreichender Batterieladung gerade in der Lage, sich selbst zu tragen. So war es nicht schwer, die Rollen zu verteilen: Die Industrieroboter sollten die Spielzeugroboter zusammenbauen und diese für sich arbeiten lassen. Noch vor Weihnachten fiel der Startschuss zu einer Projektlehrveranstaltung, in der die Studierenden zunächst mit Lego "spielen" durften. Nachdem eine geeignete Programmierumgebung für die Lego-Roboter gefunden war, konnten die Möglichkeiten des Systems in einer der Programmiersprache C ähnlichen höheren Sprache getestet werden. Erste Versuche zeigten, dass es eine große Herausforderung werden würde, ein solch kleines System zu beherrschen. Mit den begrenzten sensorischen Fähigkeiten bedurfte es einiger Mühe, einen geplanten Weg auf einer ebenen Unterlage abzufahren und danach in eine definierte Endposition zu gelangen, damit die kleinen mobilen Roboter von den Industriearmen aufgenommen werden konnten. Dann kamen die Industrieroboter hinzu. Im Auslieferungszustand waren die beiden Roboter eigenständige Systeme. Bis sie kooperieren, also gemeinsam eine Aufgabe lösen konnten, waren umfangreiche Hard- und Software-Arbeiten erforderlich. Bis zum Beginn der Ausstellung haben sich dabei zwei Szenarien herausgebildet, die von zwei Studierenden entworfen worden sind. Die Industrieroboter werden dabei diagonal in einem Käfig mit quadratischem Grundriss aufgestellt. Zwischen den Armen befindet sich der Montageplatz. Hier wird ein Lego-Roboter aus einem vorgefertigten Fahrgestell, einem Block aus drei Lichtsensoren und dem "intelligenten" Kern, dem Baustein mit dem Mikrorechner, zusammengesetzt. Nachdem der fahrbare Roboter auf einer ovalen Spur, die auf den Boden gedruckt ist, abgesetzt und eingeschaltet wurde, setzt er sich in Bewegung und folgt ihr mittels zweier Lichtsensoren, die die schwarze Spur vom weißen Untergrund unterscheiden können. Durch Markierungen gesteuert hält er kurzzeitig zielsicher an, lässt sich be- und entladen und schließlich wieder aufnehmen und demontieren. Auf der anderen Seite der Installation wurde ein runder Tisch aufgebaut, der von einer Rinne umgeben ist. Die Aufgabe des hier zum Einsatz kommenden Lego-Roboters mit Schaufel und Raupenfahrwerk ist es, die auf dem Tisch ausgeschütteten bunten Bausteine vom Tisch zu schieben und dabei auf keinen Fall selbst herunterzufallen. Diese Aufgabe und das Aufsuchen der Zielposition, damit der Roboter zeitweise vom Tisch genommen werden kann, wurde auch hier mit nur drei Sensoren bewerkstelligt. Die Präsentation dieser Szenarien in einer Ausstellung, die immerhin fünfeinhalb Monate dauert, ist mit einigen Problemen behaftet. Zum einen waren Dauerversuche aufgrund der kurzen Entwicklungszeit nicht möglich. Zum anderen kollidiert hier ein System mit einer immer gleichen Genauigkeit und ohne Ermüdungserscheinungen mit einem Spielzeug, das sich erfahrungsgemäß schnell abnutzt und unter Dauerbelastung seine Form ändert. Dies macht eine ständige Überwachung und Optimierung des Montageablaufs, aber auch der Steuerungs- und Kooperations-Software notwendig. Das Exponat wird in den nächsten Monaten ständig weiterentwickelt, was möglicherweise an veränderten Abläufen zu sehen ist. Mathias Neumann
Leserbriefe |
|
TU intern - Juni 2000 |
||