Ein Roboter für alle Fälle
Aus einer Studierendenidee erwuchsen neue Forschungsprojekte
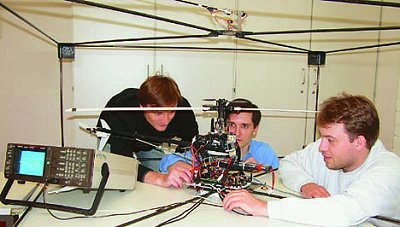 |
| Konstantin Kondak (M.) hat
mit seinen Studierenden bereits einen Prototyp des fliegenden
Roboters gebaut |
Dreißigtausend US-Dollar konnten die Informatik-Studierenden
einstreichen. Der Sieg sogar über amerikanische und kanadische
Konkurrenten bei einem über drei Jahre laufenden Wettbewerb
zum Bau eines fliegenden, vollkommen autonom handelnden Roboters
war der Lohn für die jahrelange Entwicklungsarbeit an ihrem
Flugroboter "Marvin". Das war im Juli 2000. Gearbeitet
wurde an "Marvin" bereits seit 1997. Die Kompetenz, die
die jungen Studierenden bei der Entwicklung erarbeitet haben, ist
längst in Lehre und Forschung eingegangen. Prof. Dr. Günter
Hommel, in dessen Fachgebiet
"Prozessdatenverarbeitung und Robotik" der Flugroboter
entwickelt wurde, konnte inzwischen Gelder für mehrere zukunftsträchtige
Forschungsprojekte einwerben.
Einer der "Marvin"-Studierenden der ersten Stunde, Volker
Remuß, ist heute Wissenschaftler an der TU Berlin und arbeitet
seit zwei Jahren an dem EU-geförderten Projekt COMETS, das
mehrere unbemannte Fluggeräte für gemeinsame Aktionen
programmieren will, anwendbar zum Beispiel im Katastrophenschutz.
Zusammenarbeiten sollen verschiedenartige Geräte wie Helikopter
und Luftschiffe. Mit Infrarottechnik können die Roboter, beispielsweise
bei einem Waldbrand, bei dem bemannte Flüge zu gefährlich
wären, hochauflösende Fotos machen, um die Situation vor
Ort einschätzen zu können. In diesem Projekt wird unter
anderem eine Weiterentwicklung des Kommunikationssystems vom studentischen
Flugroboter "Marvin" verwendet, sowie das Fluggerät
selbst. "Die Integration, also das Zusammenführen der
drei Fluggeräte, und der kommunikative Austausch funktionieren
schon zu 80 Prozent", erklärt Volker Remuß über
den Stand des Projekts.
Marek Musial, ehemals wissenschaftlicher Mitarbeiter im "Marvin"-Projekt,
ist inzwischen promovierter Wissenschaftler. Er erforscht in einem
soeben von der Deutschen
Forschungsgemeinschaft (DFG) bewilligten Projekt die Möglichkeit,
Erkenntnisse der Neurobiologie zur Informationsverarbeitung auf
die Steuerungsmechanismen autonomer, mobiler Roboter zu übertragen:
ein Roboter, der sich erinnern kann, was er gelernt hat. Dieser
Roboter wird mit Kameras und Navigationsmodulen ausgestattet, die
Kollisionen vermeiden und bereits bekannte Orte selbstständig
ansteuern. Das hätte beim Entwurf den kostensparenden Effekt,
dass nicht jedes Detail der späteren Einsatzumgebung bereits
modelliert und angelegt sein müsste. Auch hier werden die Erfahrungen
aus dem ehemaligen Studierendenprojekt verarbeitet. An diesem Projekt
ist das Fachgebiet
Neuronale Informationsverarbeitung von Prof. Dr. Klaus Obermayer
beteiligt.
"Ohne die Vorarbeiten und Erkenntnisse aus dem ‚Marvin'-Projekt
wäre unser Vorhaben nicht möglich gewesen", sagt
auch Dr. Konstantin Kondak. Er leitet ein drittes, ebenfalls von
"Marvin" inspiriertes, ganz neu bewilligtes DFG-Forschungsprojekt:
ein Transportsystem, bestehend aus mehreren Hubschraubern, die durch
ein aufeinander abgestimmtes Steuerungssystem exakte gemeinschaftliche
Aktionen ausführen können; zum Beispiel große Lasten
transportieren, für die es kein geeignetes Transportgerät
gibt, oder Aufgaben in schwer zugänglichen Gebieten übernehmen.
Menschliche Piloten für eine derart auf exakte, simultane Zusammenarbeit
angelegte Aufgabe einzusetzen, ist ausgesprochen riskant. Roboter
wären hier sehr von Vorteil. Das Projekt steht noch ganz am
Anfang, aber im Labor dreht bereits ein kleiner Prototyp seine Runden.
"Bislang gibt es in Europa kaum ähnliche Projekte",
bedauert Kondak, allerdings mit einem weinenden und einem lachenden
Auge. So fehlen ihm zwar Partner, von deren Erfahrungen seine Arbeit
profitieren könnte, aber er ist auch stolz, Teil eines Fachgebiets
mit einzigartiger und zukunftsträchtiger Forschung zu sein.
Patricia Pätzold
|
 |

